Hardware
Reading Assignment
In "The Origins and Development of Robotic Art," by Eduardo Kac, he discusses some of the history of robotic art and why this art form needs to be considered in contemporary art. The first commercial robot was created in the early 1960's and has developed dramatically since then and are used industrially. Modern artists have started to use robots as a new medium in things such as robotic art, telepresence art, and cybernetic art, and often incorporating two or more of these forms. In the 1960's we started to see the first robotic artwork, starting with Nicolas Schoffer's piece called Cybernetic Spatiodynamic Sculpture which was a type of interactive artwork that responded to viewers' movements. Another work by Paik called K-456 was meant to entertain its' viewers. Unlike most robots, which typically replace human jobs, this robot created jobs for people because it took five people to operate it for ten minutes. Shannon's robot Squat was a cybernetic piece and combined a live plant with a wired robotic sculpture that reacted to viewers' touch. The Senster created by Ihnatowicz was a biomorphic computer-controlled, "shy" robot. It was the first computer-controlled artwork that used both software and hardware aspects. White's Helpless Robot asks it's viewers for help and adjusts its' behaviors according to their mood. In 1980, Mark Pauline founded Survival Research Laboratories (SRL) that was a team of artists who collaborated to create performances using lights, machines, sound, explosives, and other elements. One performance piece was Stelarc's work The Third Hand which was a robotic arm attached to his right arm. Other artists started to work with telepresence art where participants are projected into a different place geographically than they are physically. Robotic art has since transformed into other forms such as performance, theatre, telepresence, installation and dance pieces.
In "Vehicles: Experiments of Synthetic Psychology" by Valentino Braitenberg, Braitenberg discusses hypothetical vehicles with sensors and motors that are sensitive to light and temperatures. The more complex the object with various combinations of connections, the smarter the object seems to get. You might think that vehicle 3c in particular is knowledgeable because it is programmed to dislike high temperatures and as a reaction will run into light bulbs to destroy them. These types of things might appear to be knowledge but really are not.
What I found most interesting about Eduardo Kac's passage is Paik's robot that entertains its' viewers. This robot, unlike most, actually creates jobs for people because it takes five people to control it. It's ironic because most robots replace manual labor and take away jobs. Another thing I found interesting was White's Helpless Robot which asks its' viewers for help. In most cases, robots assist humans, so the roles are switched and I found this amusing and clever. Something that I found interesting about Valentino Braitenberg's passage was his statement that certain parts of animal brains are interpreted as computer machinery because of their simplicity and regularity. It's fascinating to me that humans can almost emulate parts of the brain by using computers.
Project
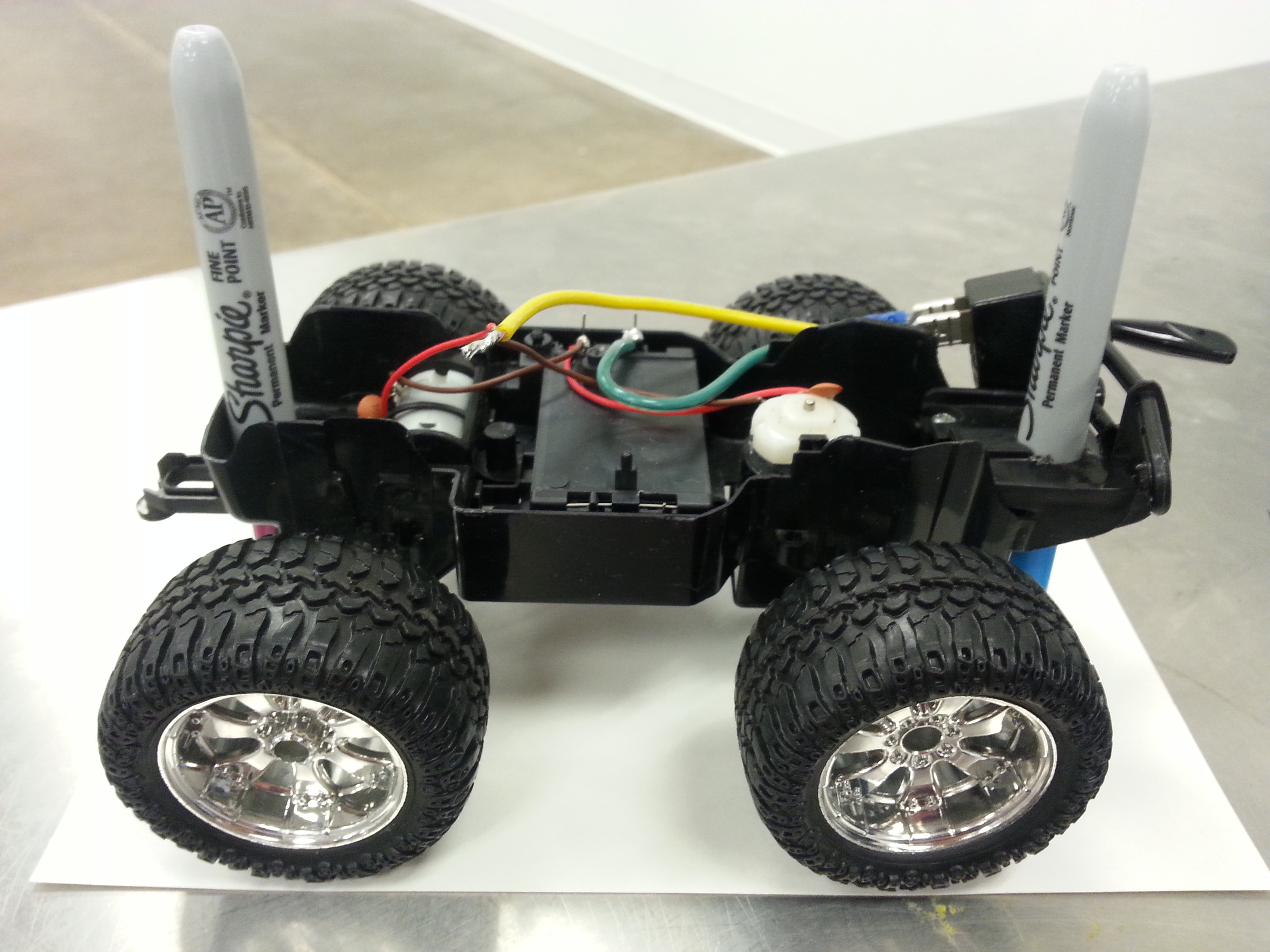
My drawing robot is made from a remote controlled, toy car that runs on batteries. It uses two motors, one that continuously turns the front wheels to the left when turned on, and one that propels the back wheels forward. This creates the circular motion shown in the video, above. I modified my robot by adding an on/off switch and by adding two different colored sharpies to it, one on the back, and one on the front. These sharpies can be changed out when they run out of ink or when viewers want to change the colors that are being drawn by the robot.
In "Vehicles: Experiments of Synthetic Psychology" by Valentino Braitenberg, Braitenberg begins with, "We will talk only about machines with very simple internal structures, too simple in fact to be interesting from the point of view of mechanical or electrical engineering. Interest arises, rather, when we look at these machines or vehicles as if they were animals in a natural environment. We will be tempted, then to use psychological language in describing their behavior. And yet we know very well that there is nothing in these vehicles that we have not put in ourselves." These vehicles that Braitenberg talks about use sensors, motors, and connections to function. My vehicle uses motors and connections to operate but does not use sensors.
After explaining and describing several vehicles with different connections, Braitenberg concludes his paper by saying, "You cannot help admitting Vehicle 3c has a system of values, and, come to think of it, knowledge, since some of the habits it has, like destroying light bulbs, may look quite knowledgeable, as if the vehicle knows that light bulbs tend to heat up the environment and consequently make it uncomfortable to live in. It also looks as if it knows about the possibility of making energy out of oxygen and organic matter because it prefers places where these two commodities are available. But, you will say, this is ridiculous: knowledge implies a flow of information from the environment into a living being or at least into something like a living being. There was no such transmission of information here. We were just playing with sensors, motors, and connections: the properties that happened to emerge may look like knowledge but really are not. We should be careful with such words." Many of our drawing robots will probably appear to have a mind of their own, but in reality they are only doing what we programmed them to do.